ROS-多机通信
前言:一定要在同一路由的局域网下进行,就是两台电脑的ip要像这样:192.168.191.4和192.168.191.8,只有最后一位不同,这样就能ping通了,否则ping不同。
一、查看ip和主机名
1.1 查看ip:
ifconfig
-----------------------------------------
显示如下:
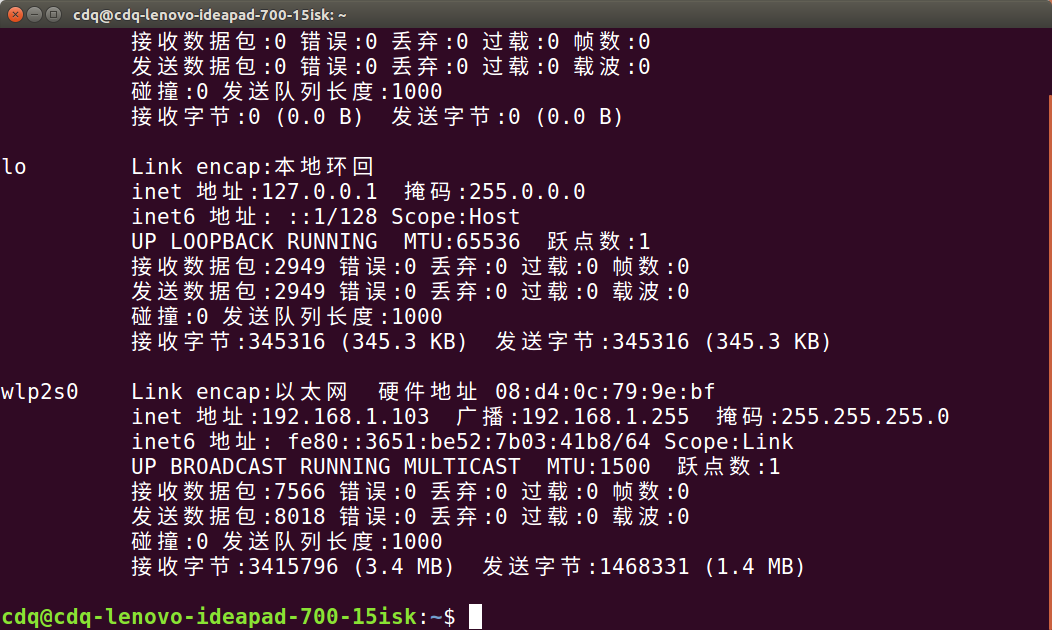
其中,lo是网线连接情况下的id,下边的wlp2s0是无线连接情况下的ip地址.
分别查看两台电脑的ip地址并用笔记本记录下来.一定要在同一局域网下进行!
1.2 查看主机名
hostname
分别查看两台电脑的ip地址并用记录下来.
这里说明一下,如果在"关于这台计算机"的选项里修改了名字后,导致没有了管理员权限,每次打开终端都会提示:To run a command.......
遇到这种情况,输入如下代码可以解决:
touch ~/.sudo as admin successful
二、修改host文件
2.1 打开host文件:
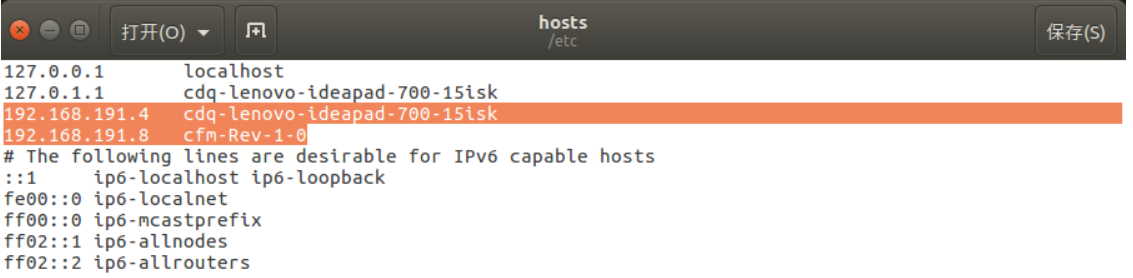
gksu gedit /etc/hosts
2.2 修改host文件
按照如下形式分别在两台电脑上添加ip和主机名:
2.3 重启网络:
两台电脑都需要重启网络。
sudo /etc/init.d/networking restart
三、实现通信
3.1 在两台电脑上装上chrony包:
sudo apt-get install chrony
3.2 在两台电脑上都安装ssh服务器:
sudo apt-get install openssh-server
3.3 确认服务器是否已经启动:
ps -e|grep ssh
如果看到sshd则说明ssh-server已经启动.
3.4 检测是否双向连通:
先ssh自己的主机名:
ssh one_name
然后ping另一台电脑的主机名:
ping tow_name
-----------------------------------------
显示如下:

接着在另一台机器操作:
ssh tow_name ping one_name
-----------------------------------------
显示如下:

如果两台机器都出现如上结果,说明双向连通,只要有一个没出现下边的结果就是没有连接成功,而多级通信必须保证双向连通.
3.5 修改.bashrc文件
在两台电脑上都使用下面的命令来编辑.bashrc文件:
gedit ~/.bashrc
在A端这边的bashrc文件的最后添加:
export ROS_HOSTNAME=one_hostname export ROS_MASTER_URI=http://one_hostname:11311
-----------------------------------------
解析:
第一条是本机的主机名
第二条 是主机,也就是要运行roscore节点的电脑端的主机名
在B端这边的bashrc文件的最后添加:
export ROS_HOSTNAME=tow_hostname export ROS_MASTER_URI=http://one_hostname:11311
注意:两台机器的export ROS_MASTER_URI=http://one_hostname:11311这条是一样的.
四、验证
4.1 电脑A端
首先在主机,启动 ROS:$ roscore 然后运行:
rosrun turtlesim turtlesim_node
4.2 电脑B端
rosrun turtlesim turtle_teleop_key
现在,你可以在电脑B端控制A上的小乌龟移动啦!
-END-
最新文章
- c语言实现开灯问题
- jQuery介绍 DOM对象和jQuery对象的转换与区别
- 前后台获取上下文context
- @OneToMany---ManyToOne
- linux项目-之系统安装部署-cobbler
- 第50讲:Scala中Variance变化点
- python基础字符串操作
- myBatis 参数配置
- 为Fitnesse-20140630定制RestFixture代码
- Oracle Instanc Client安装命令工具
- epclise设置tomcat方法(步骤)(菜鸟巧记二)
- win32SDK的hello,world程序
- C# 关闭窗体立即停止进程
- 字典树trie
- [原创软件]Maya报错窗口监测器
- codeforces24D
- html(二)常见符号
- QQ第三方登录(完结篇)
- ArcGIS中国工具2.5正式发布
- 深入理解指针—>结构体里的成员数组和指针