第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch。
2.在虚拟机端启动 roslaunch opencv_apps edge_detection.launch 进行边缘提取采集。
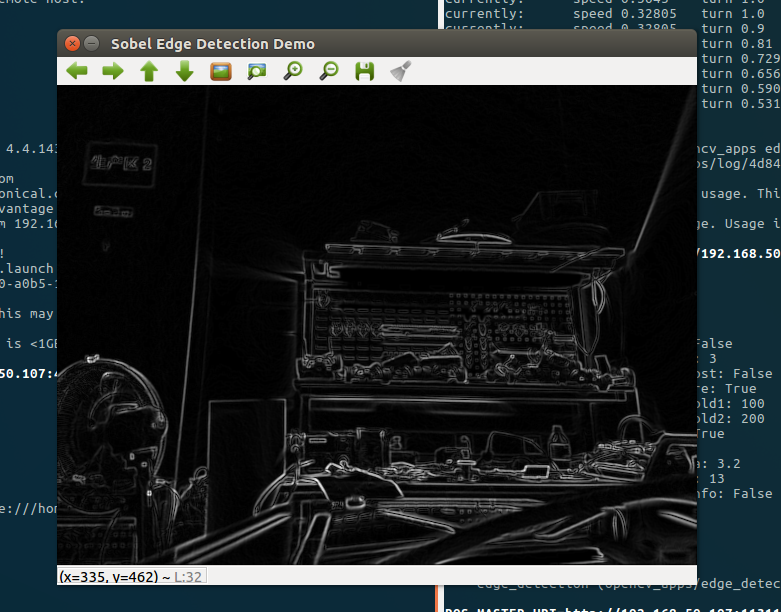
效果如下:
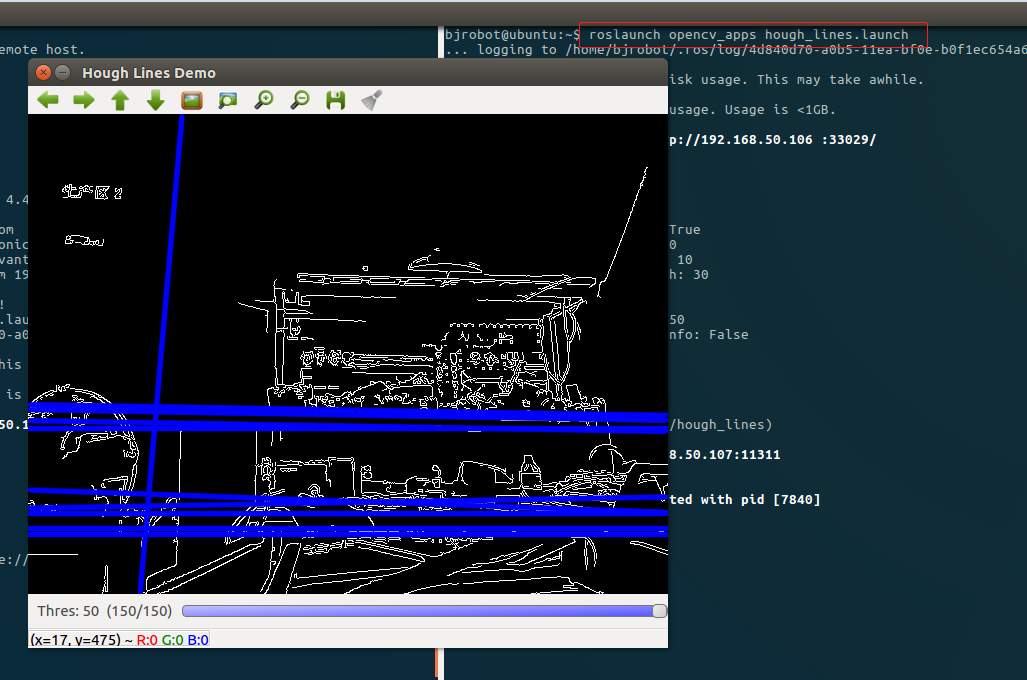
3.在虚拟机端启动 roslaunch opencv_apps hough_lines.launch 进行哈夫变换直线检测。
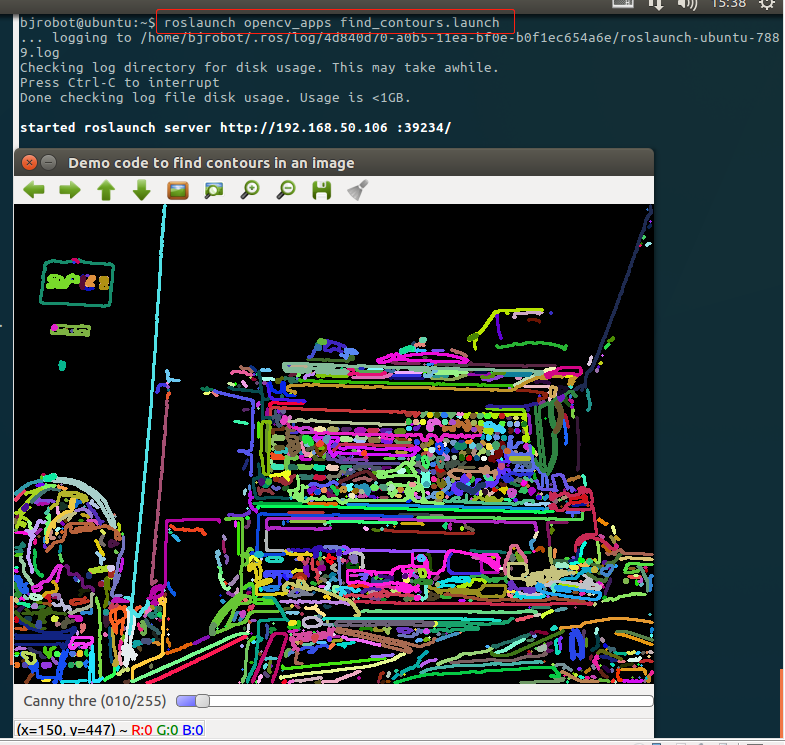
4.在虚拟机端启动 roslaunch opencv_apps find_contours.launch 进行霍夫变换日元检测

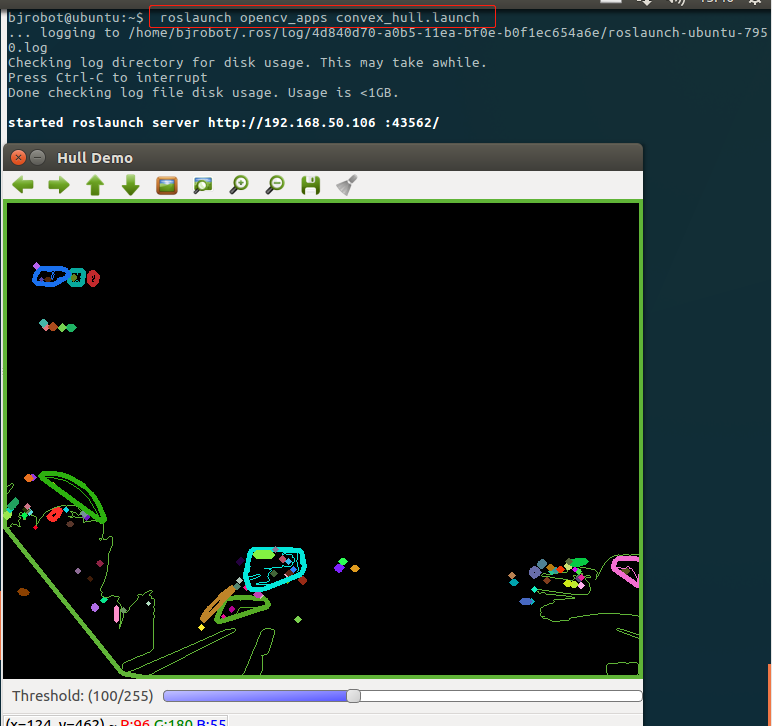
5.虚拟机端启动 roslaunch opencv_apps convex_hull.launch 进行凸包检测
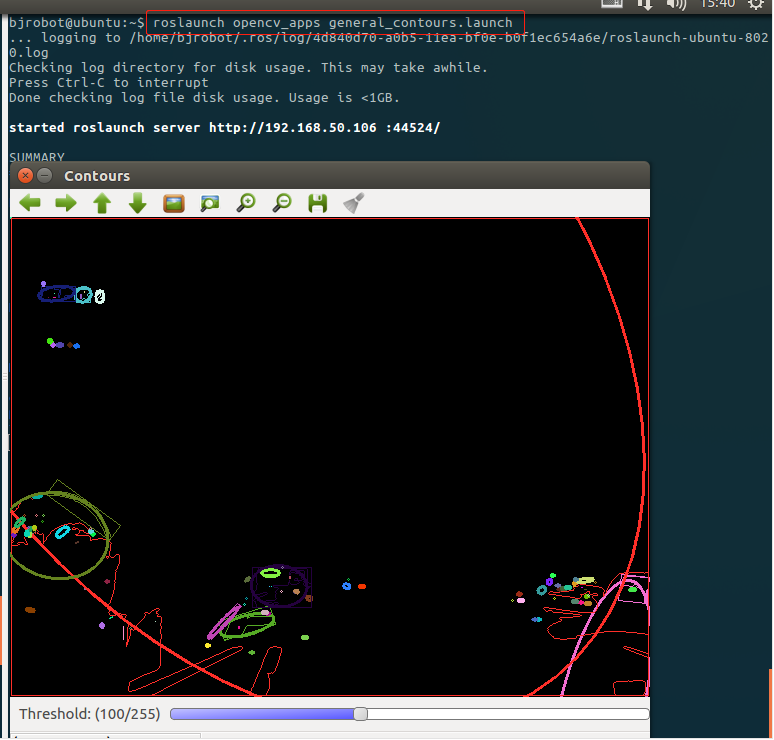
6.在虚拟机端启动 roslaunch opencv_apps general_contours.launch 进行椭圆形检测。
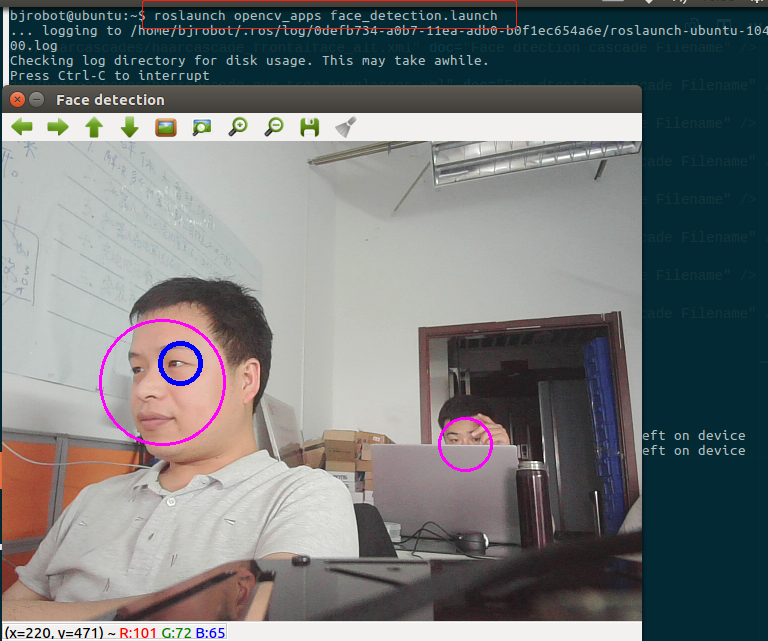
7.在虚拟机端启动 roslaunch opencv_apps face_detection.launch 进行人脸检测
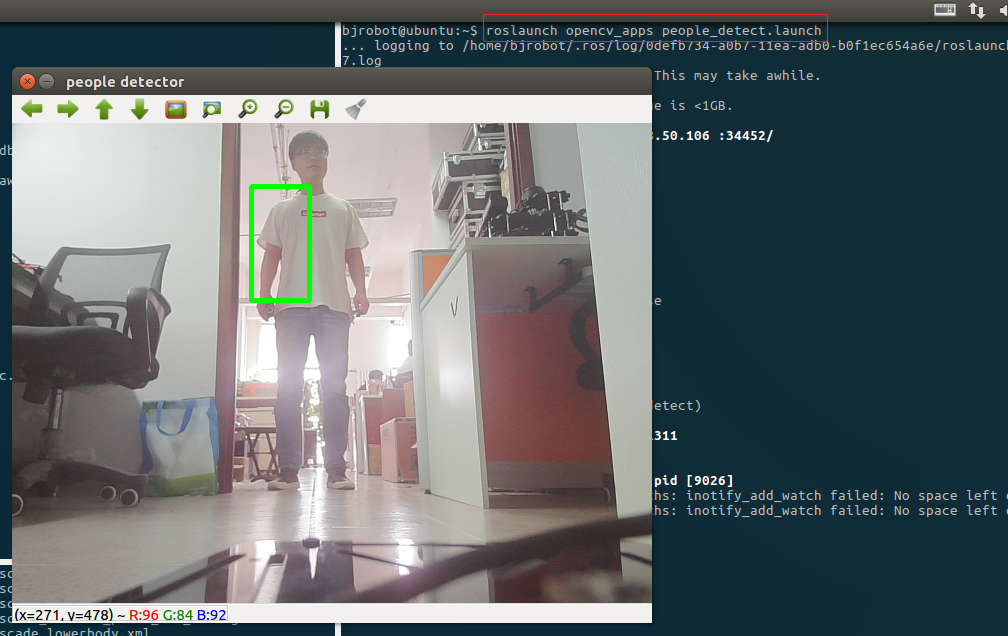
8.在虚拟机端启动 roslaunch opencv_apps people_detect.launch hot 特征量进行人的检测。
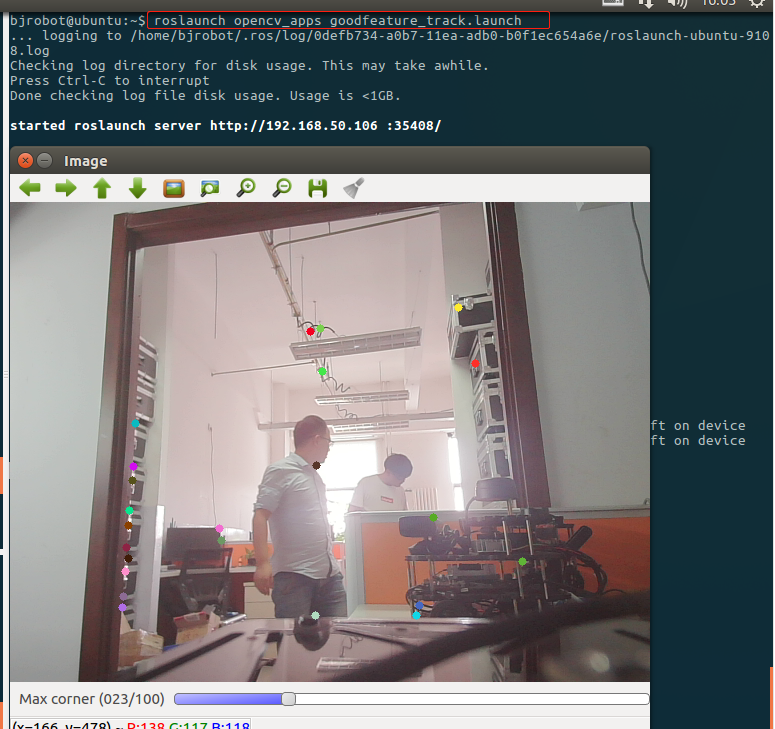
9.在虚拟机端启动 roslaunch opencv_apps goodfeature_track.launch 进行动作特征分析。
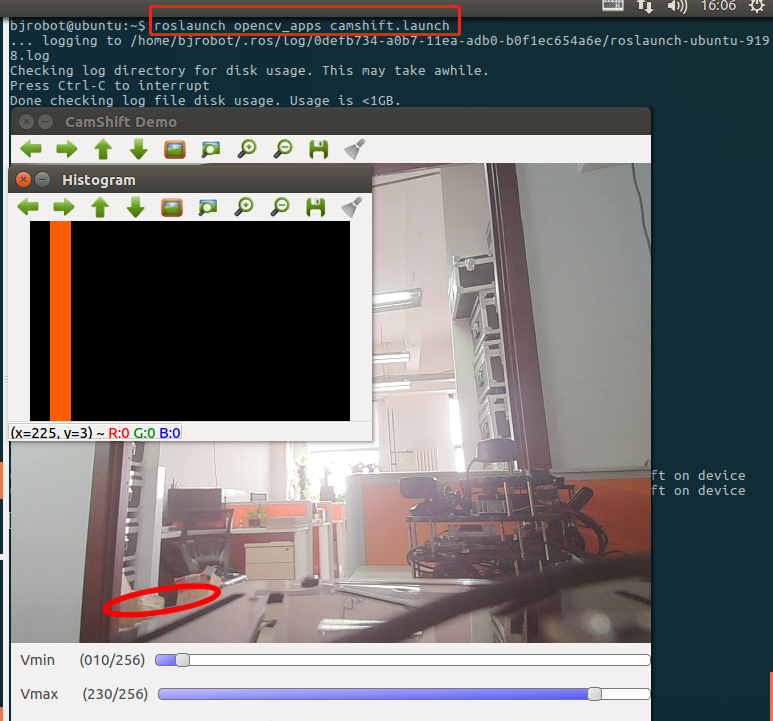
10在虚拟机端启动 roslaunch opencv_apps camshift.launch 进行颜色检测。
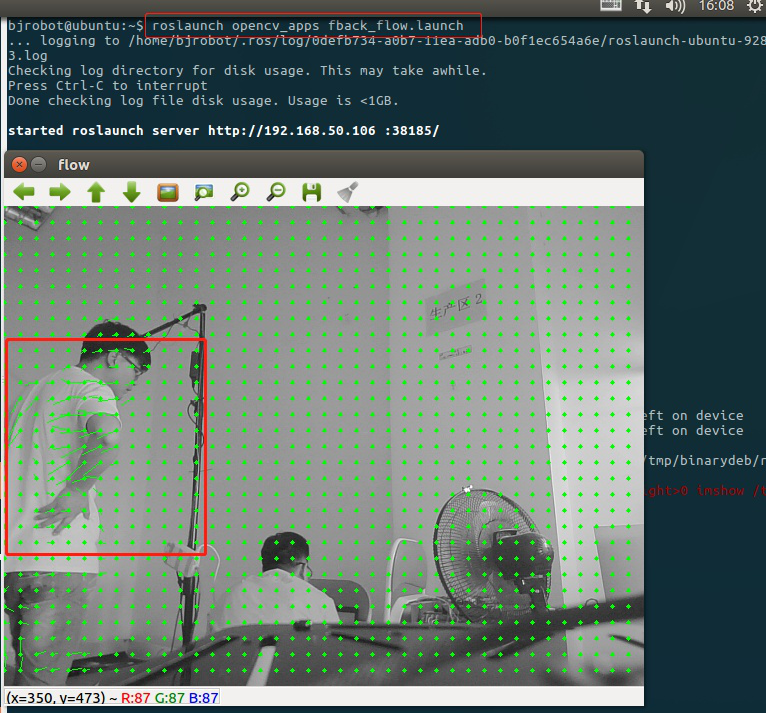
11.在虚拟机端启动roslaunch opencv_apps fback_flow.launch 进行gunnar farneback (optle)检测
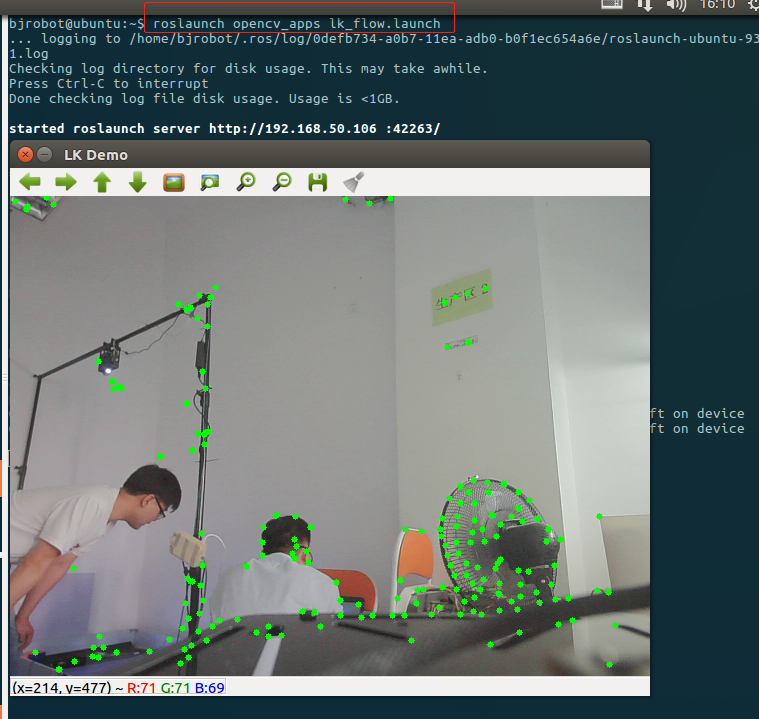
12.在虚拟机端启动 roslaunch opencv_apps lk_flow.launch 进行 lucas- kanade 法的optle 流检测
13.在虚拟机端启动 roslaunch opencv_apps phase_corr.launch 进行周波数相位模拟计算。
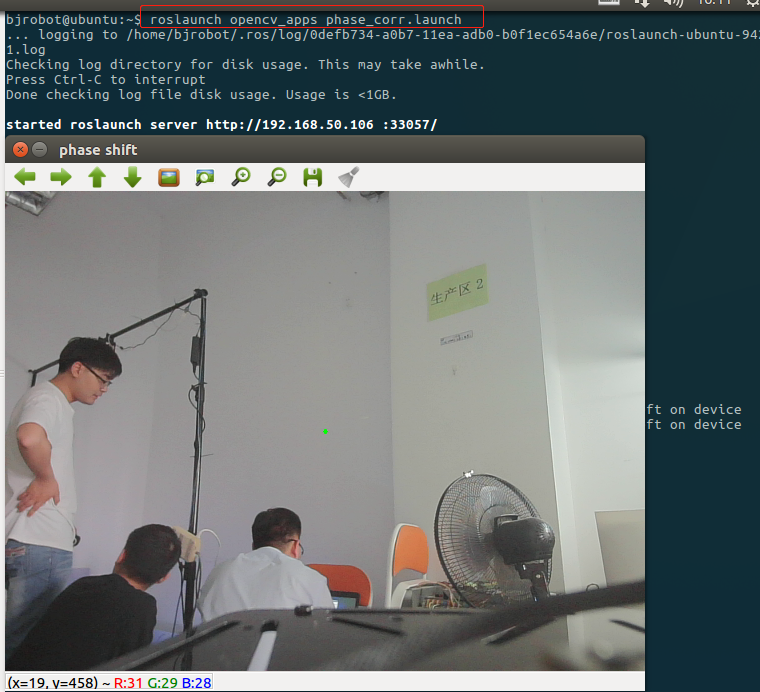
14.在虚拟机端启动 roslaunch opencv_apps simple_flow.launch进行simple_flow 的 opta 流检测
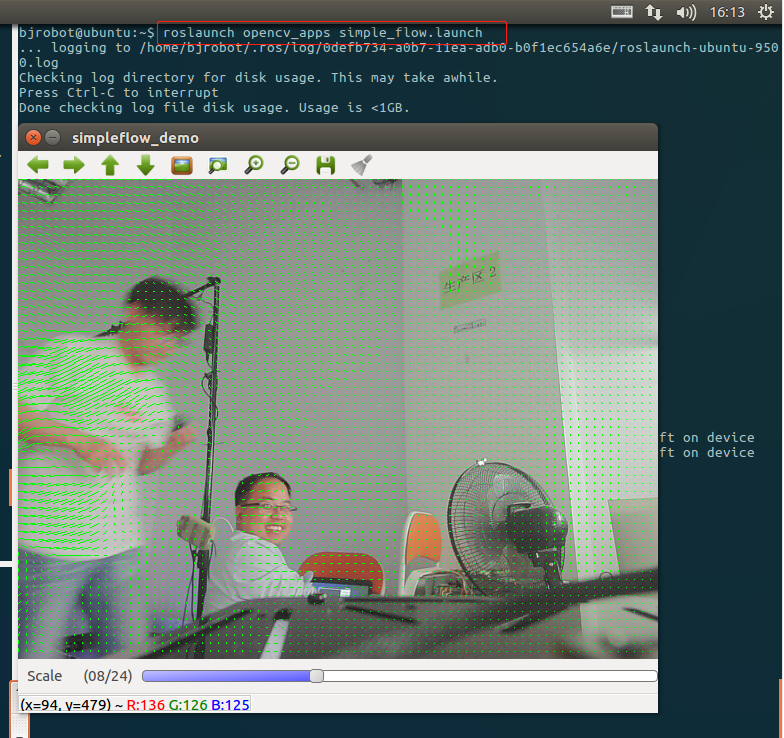
15.在虚拟机端启动 roslaunch opencv_apps segment_objects.launch 进行单一物体的区域分割
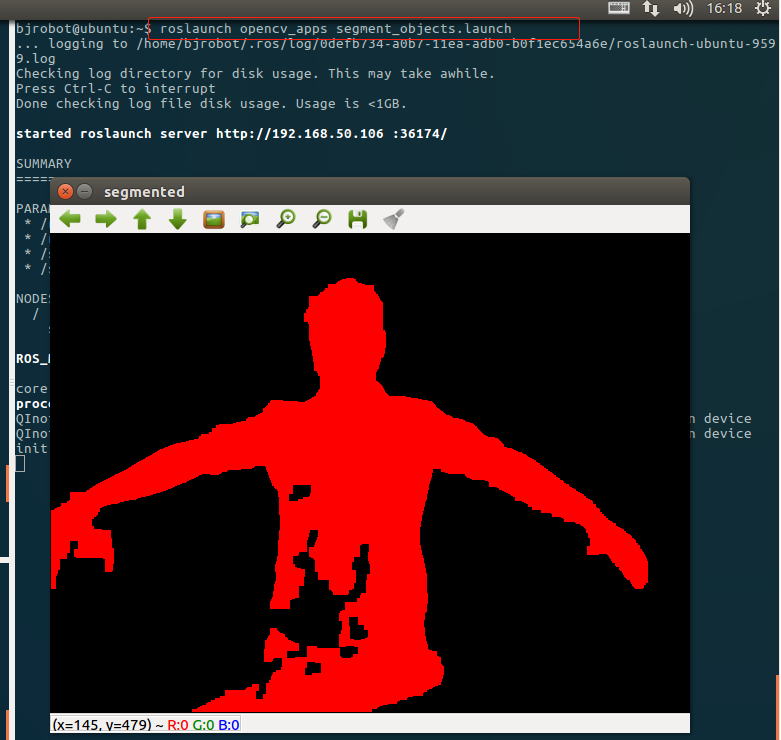
16.在虚拟机端启动 roslaunch opencv_apps rgb_color_filter.launch 进行图像过滤。

17.在虚拟机端启动 roslaunch opencv_apps hls_color_filter.launch 进行 hls 色特征采集
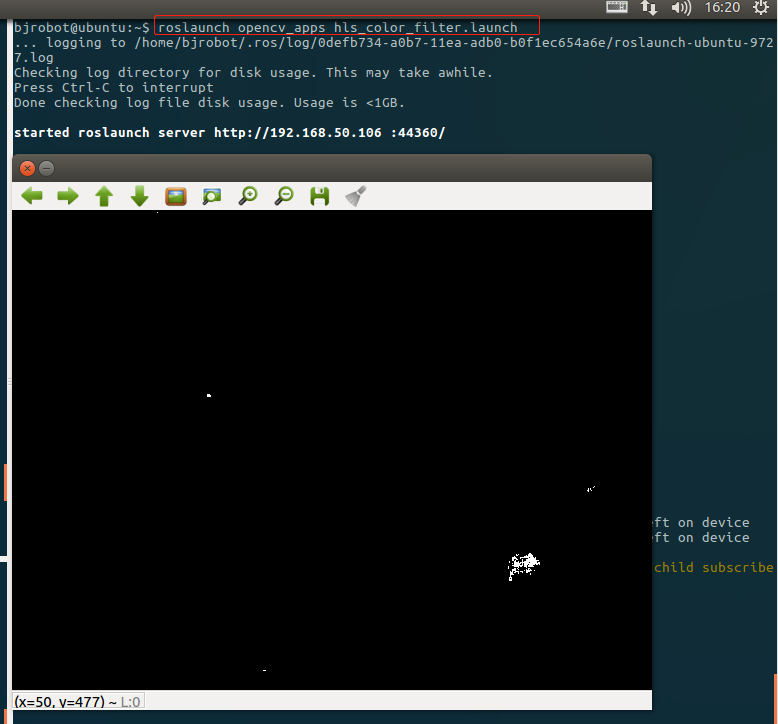
18.在虚拟机端启动 roslaunch opencv_apps hsv_color_filter.launch 进行 hsv 色特征采集
最新文章
- 前端上传组件Plupload使用指南
- Java并发编程笔记—基础知识—实用案例
- JAVA中集合类的使用
- 2014多校第七场1005 || HDU 4939 Stupid Tower Defense (DP)
- powershell查看pc信息的常用命令
- Java 图形编程 二:布局管理器之顺序布局
- Centos6.4安装Mono和MonoDevelop
- JDBC之组件封装
- CenOS 6.5下 mysql自动备份
- .NET(c#) 移动开发平台 - Smobiler(1)
- Scala 编码习惯
- FragmentTabHostAutoDemo【FragmentTabHost可滑动的选项卡】
- centos7 安装mysql5.7.20(yum方式)
- sql server 日志文件结构及误操作数据找回
- iOS -数据持久化方式-以真实项目讲解
- CSS3效果:animate实现点点点loading动画效果(一)
- npm的nrm命令使用--设置镜像地址
- [翻译] FastReport TfrxReport组件使用
- [转]VS2013中使用Git建立源代码管理
- SICP读书笔记 3.1