roboware-studio 使用教程
2024-08-31 09:07:39
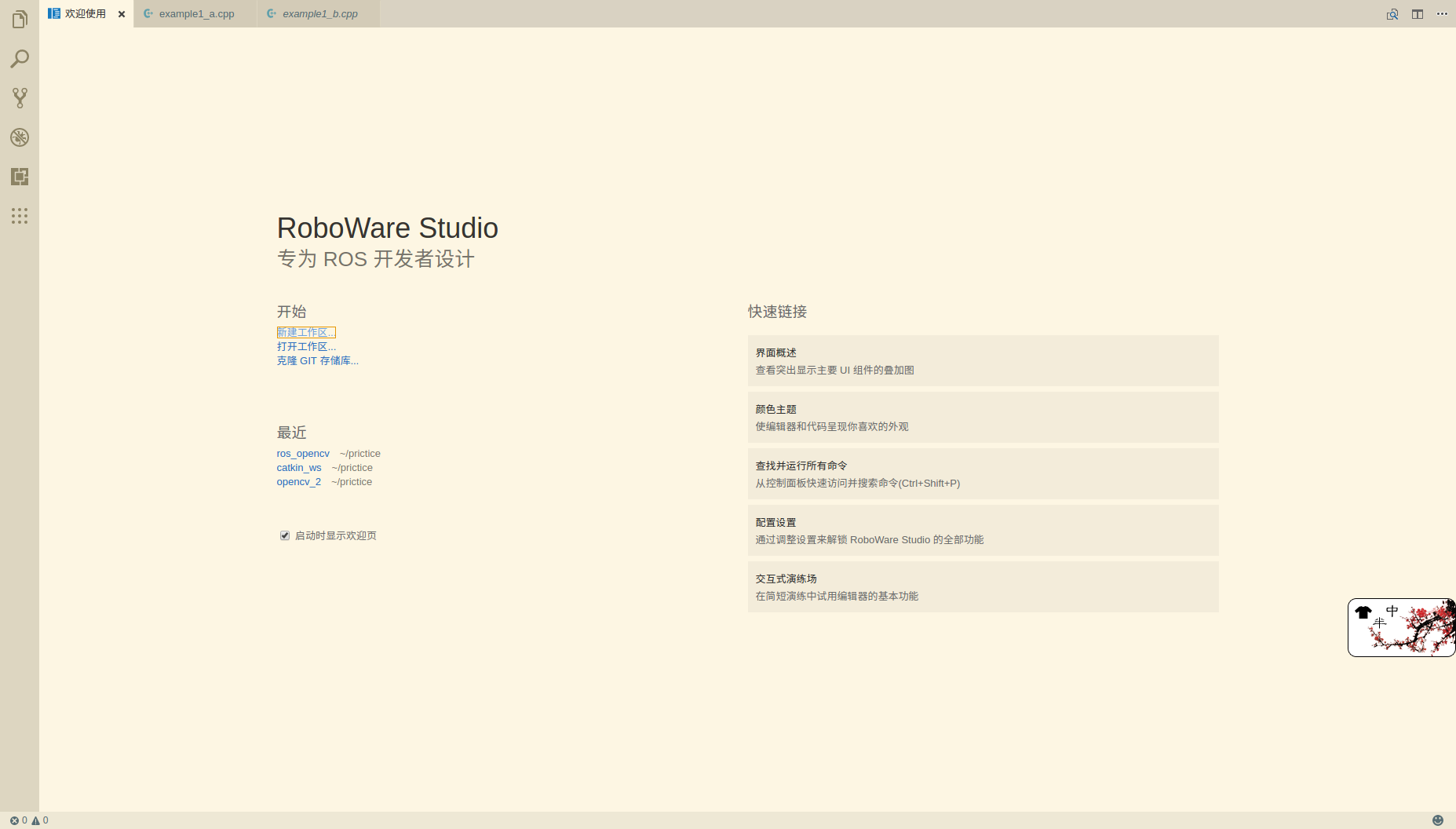
一、创建工作区
1.1 新建工作区
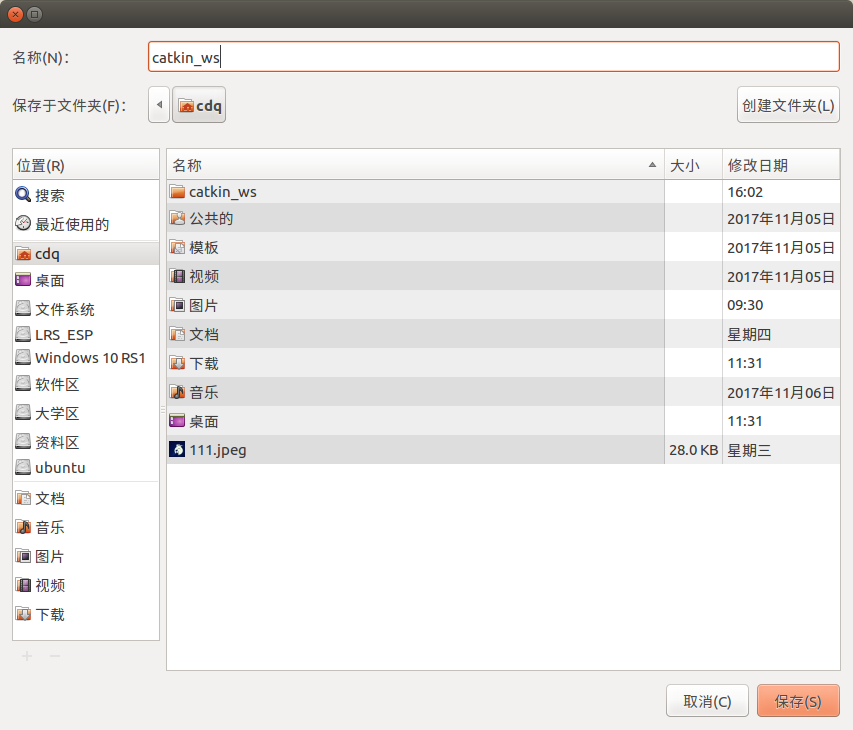
1.2 选择路径并添加工作区的名字 catkin_ws
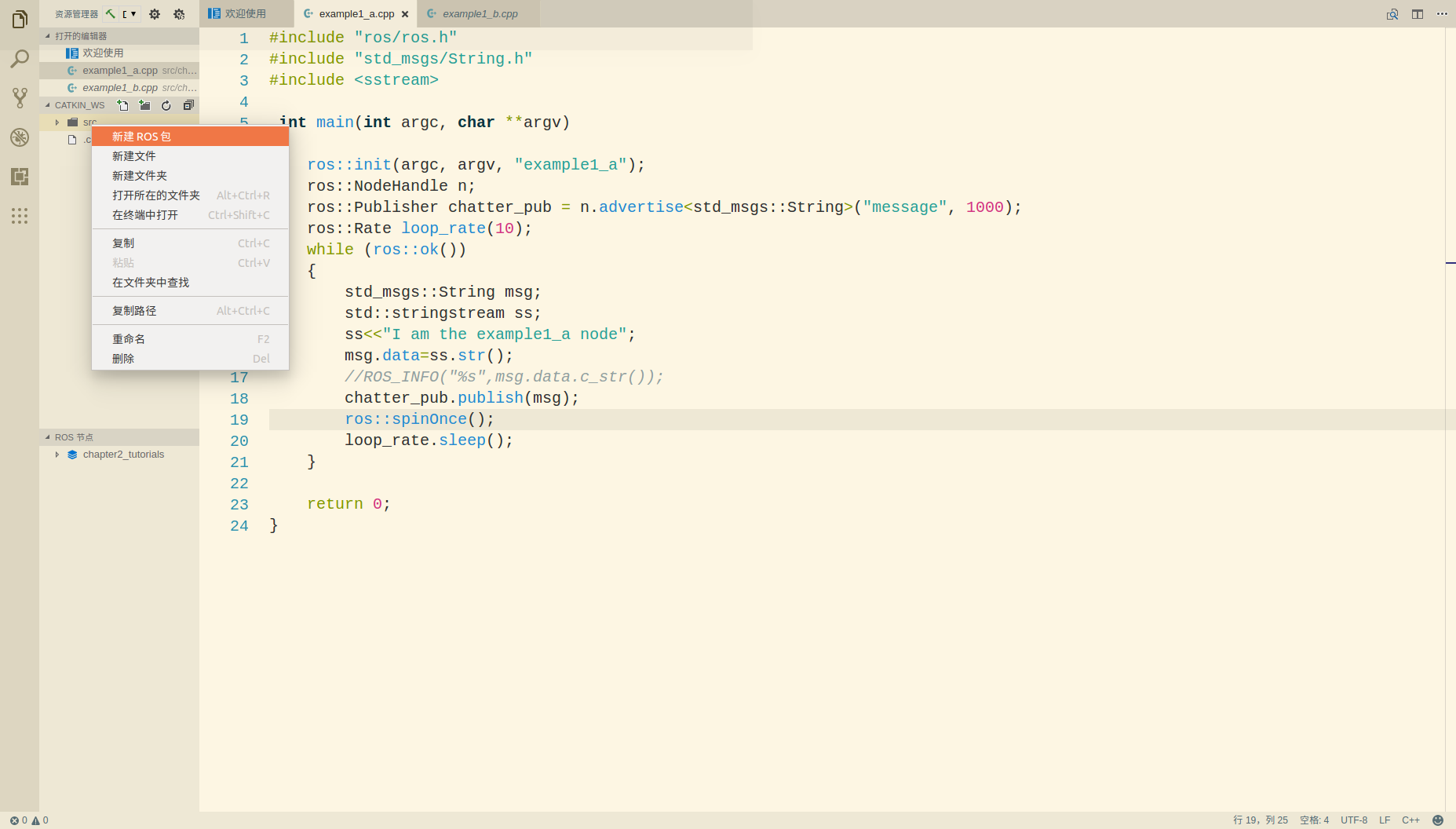
二、创建程序包
创建ROS包并添加依赖 my_package roscpp std_msgs
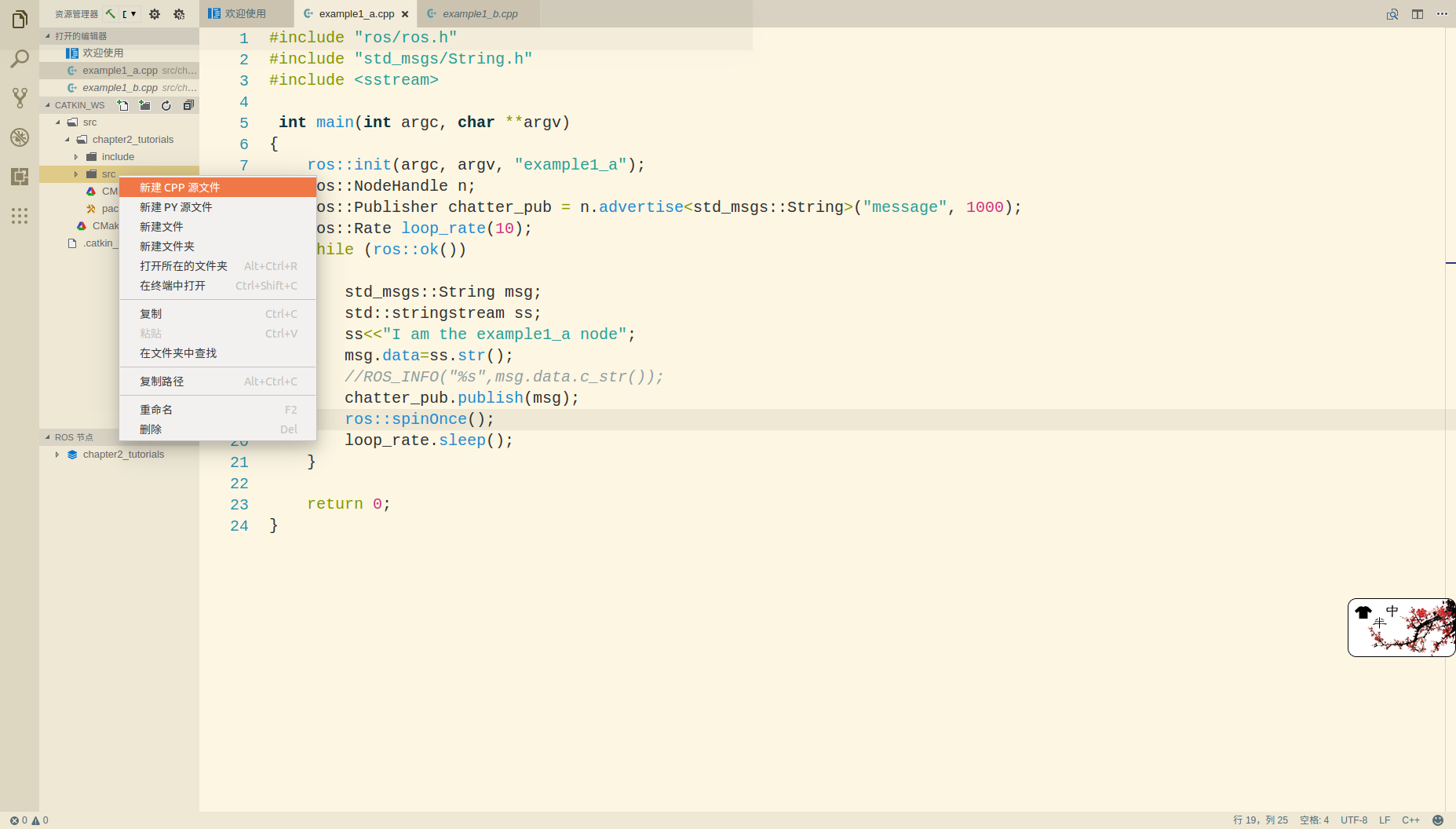
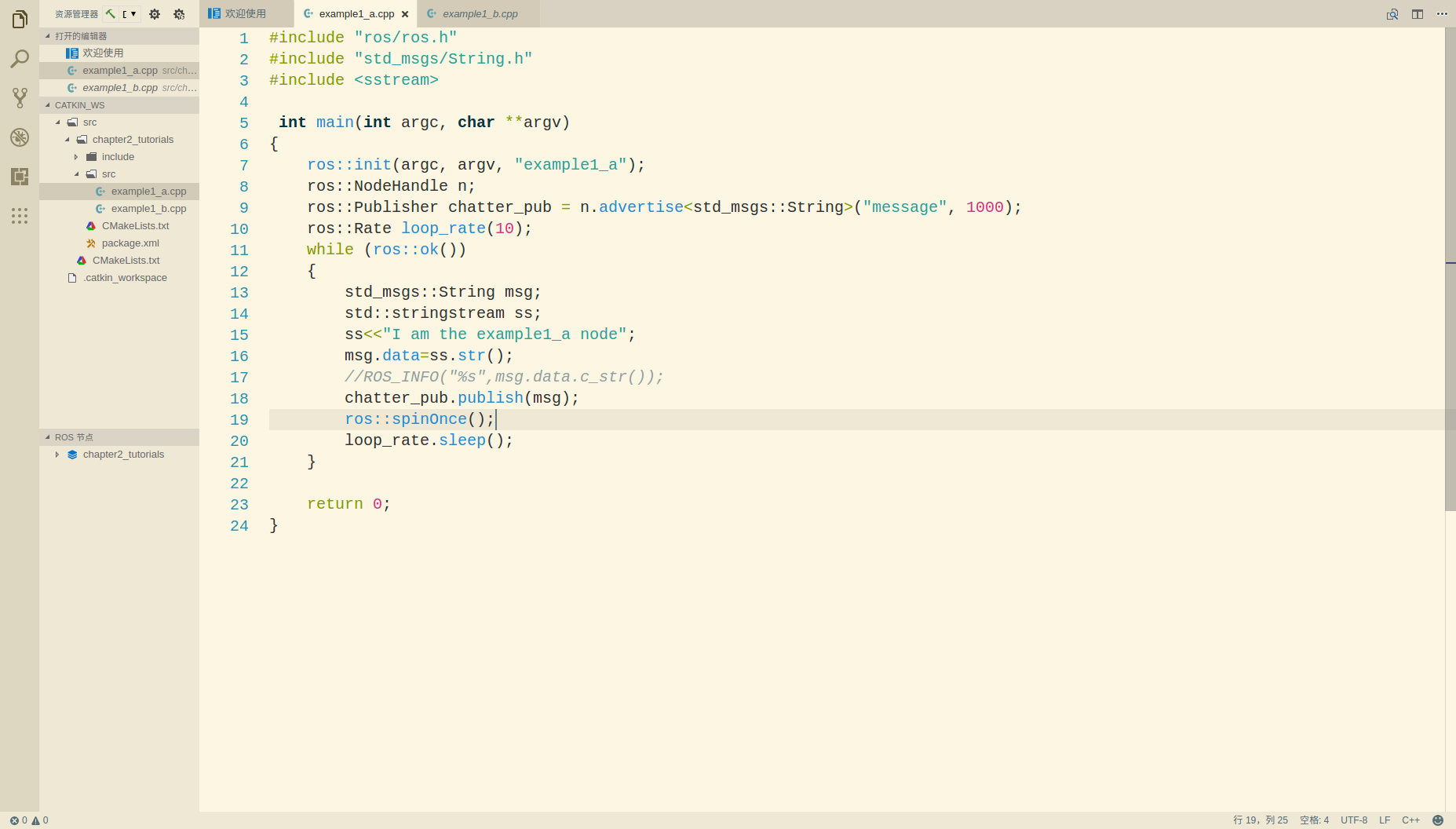
三、添加并编写.cpp源文件
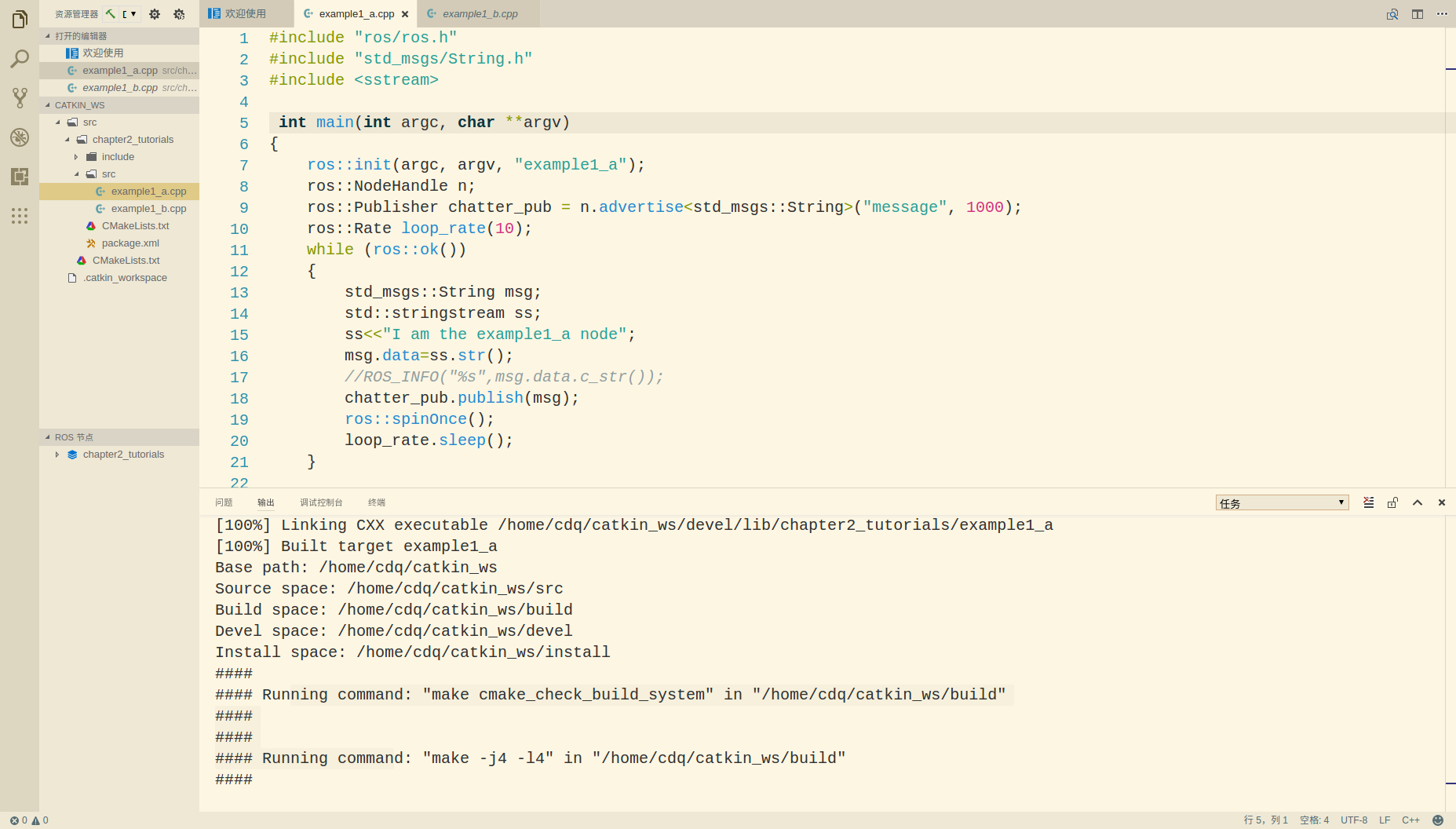
四、编译文件
点击左上角的小锤子,进行编译文件.
-END-
最新文章
- linux 驱动学习笔记03--Linux 内核的引导
- 数据分析和R语言的那点事儿_1
- C#.Net 中的 new 的几个用法
- 图像金字塔及其在 OpenCV 中的应用范例(下)
- 生成中文版JavaDoc
- uva 10986
- 搭建Hadoop集群 (三)
- ZooKeepr日志清理
- angular的$http.post()提交数据到Java后台接收不到参数值问题的解决方法
- 浅析node.js
- php的借用其他网站的页面覆盖Logo的技巧
- [Vijos 1143]三取方格数
- Python练习:九九乘法表
- python--再看并行之协程线程进程
- Flask-SQLAlchemy常用操作
- 获取当前时间并格式化,CTime类
- Instruments模板介绍(更新中...)
- linux dmesg 查看系统故障信息
- Java判断一个时间是否在时间区间内
- Linux 安装 mysql 转 http://www.cnblogs.com/fnlingnzb-learner/p/5830622.html