《机器学习实战》学习笔记——第2章 KNN
一. KNN原理:
1. 有监督的学习
根据已知事例及其类标,对新的实例按照离他最近的K的邻居中出现频率最高的类别进行分类。伪代码如下:
1)计算已知类别数据集中的点与当前点之间的距离
2)按照距离从小到大排序
3)选取与当前点距离最小的k个点
4)确定这k个点所在类别的出现频率
5)返回这K个点出现频率最高的类别作为当前点的预测分类
import numpy as np # 读取数据
def file2matrix(filename):
fr = open(filename)
arrayLines = fr.readlines()
numbersOfArray = len(arrayLines) df = np.zeros((numbersOfArray, 3))
classLabel = []
index = 0 for line in arrayLines:
# 截取掉所有的回车字符
line = line.strip()
# 使用\t将上一步得到的整行数据切分成一个元素列表
listFromLine = line.split('\t')
df[index] = listFromLine[0:3]
classLabel.append(listFromLine[-1])
index +=1 return df, classLabel
filename = '\datingTestSet.txt'
df, classLabel = file2matrix(filename)
2. KNN缺点:
(1)KNN算法是基于实例的学习,使用算法时我们必须有接近实际数据的训练样本数据。KNN必须保存全部数据集,如果训练数据集的很大,必须使用大量的存储空间。
(2)必须对数据集中的每个数据计算距离值,耗时非常大
(3)它无法给出任何数据的基础结构信息, 因此我们无法知晓平均实例样本和典型事例样本具有什么特征
二. 使用sklearn.neighbors
from sklearn import neighbors
import numpy as np x = np.array([[-1, -1], [-2, -1], [-3, -2], [1, 1], [2, 1], [3, 2]])
y = [1, 1]
nbr = neighbors.NearestNeighbors(n_neighbors=2, algorithm='auto').fit(x)
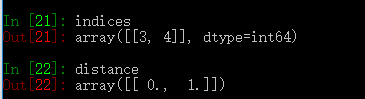
distance, indices = nbr.kneighbors(y)
结果:
最近邻算法主要分为三种:
(1)Brute Force
- 对于N个实例在D维中,枚举计算,时间复杂度:

- 随着N增加,时间消耗相当大
(2)K-D tree
1. 什么叫做K_Dtree:
K:K邻近查询中的k;D:空间是D维空间(Demension)tree:二叉树
2. 建树过程:
K-D tree的建立就是分裂空间的过程
- 首先我们来定义树节点的状态:
分裂点(split_point)
分裂方式(split_method)
左儿子(left_son)
右儿子(right_son)
- 建树依据:
先计算当前区间 [ L , R ] 中(这里的区间是点的序号区间,而不是我们实际上的坐标区间),每个点的坐标的每一维度上的方差,取方差最大的那一维,设为 d,作为我们的分裂方式(split_method ),把区间中的点按照在 d 上的大小,从小到大排序,取中间的点 sorted_mid 作为当前节点记录的分裂点,然后,再以 [ L , sorted_mid-1 ] 为左子树建树 , 以 [sorted_mid+1 , R ] 为右子树建树,这样,当前节点的所有状态我们便确定下来了:
split_point= sorted_mid
split_method= d
left_son = [ L , sorted_mid-1 ]
right_son = [ sorted_mid+1 , R ]
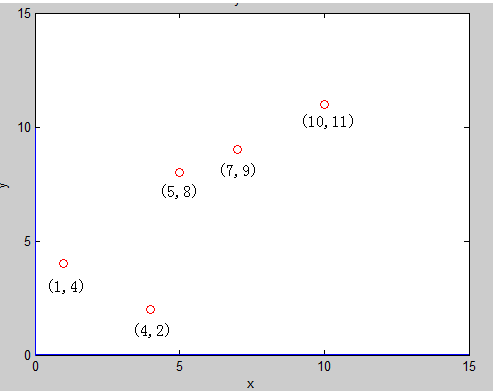
- 举例:
假设现在我们有平面上的点集 E ,其中有 5 个二维平面上的点 : (1,4)(5,8) (4,2) (7,9) (10,11)
首先,我们对整个区间 [1 , 15] 建树:先计算区间中所有点在第一维(也就是 x 坐标)上的方差:
平均值 : ave_1 =5.4
方差 : varance_1 =9.04
再计算区间中所有点在第二维(也就是 y 坐标)上的方差:
平均值:ave_2 =6.8
方差:varance_2 =10.96
明显看见,varance_2 > varance_1 ,那么我们在本次建树中,分裂方式 :split_method =2 , 再将所有的点按照第2维的大小从小到大排序,得到了新的点的一个排列:
(4,2) (1,4)(5,8) (7,9) (10,11)
取中间的点作为分裂点 sorted_mid =(5,8)作为根节点,再把区间 [1 , 2] 建成左子树 , [4 , 5] 建成右子树,此时,直线 : y = 8 将平面分裂成了两半,前面一半给左儿子,后面一半给了右儿子,如图:

建左子树 [1, 3] 的时候可以发现,这时候第一维的方差大 ,分裂方式就是1 ,把区间 [ 1, 2 ] 中的点按照 第一维 的大小,从小到大排序 ,取中间点(1,4) 根节点,再以区间 [ 2, 2] 建立右子树 得到节点 (4,2)

建右子树 [4 , 5] 的时候可以发现,这时还是第一维的方差大, 于是,我们便得到了这样的一颗二叉树 也就是 K-D tree,它把平面分成了如下的小平面,使得每个小平面中最多有一个点:

3. 查询过程:
查询,其实相当于我们要将一个点“添加”到已经建好的 K-D tree 中,但并不是真的添加进去,只是找到他应该处于的子空间即可,所以查询就显得简单的。
每次在一个区间中查询的时候,先看这个区间的分裂方式是什么,也就是说,先看这个区间是按照哪一维来分裂的,这样如果这个点对应的那一维上面的值比根节点的小,就在根节点的左子树上进行查询操作,如果是大的话,就在右子树上进查询操作。
每次回溯到了根节点(也就是说,对他的一个子树的查找已经完成了)的时候,判断一下,以该点为圆心,目前找到的最小距离为半径,看是否和分裂区间的那一维所构成的平面相交,要是相交的话,最近点可能还在另一个子树上,所以还要再查询另一个子树,同时,还要看能否用根节点到该点的距离来更新我们的最近距离。为什么是这样的,我们可以用一幅图来说明:

在查询到左儿子的时候,我们发现,现在最小的距离是 r = 10 ,当回溯到父亲节点的时候,我们发现,以目标点(10,1)为圆心,现在的最小距离 r = 10 为半径做圆,与分割平面 y = 8 相交,这时候,如果我们不在父亲节点的右儿子进行一次查找的话,就会漏掉(10,9) 这个点,实际上,这个点才是距离目标点 (10,1) 最近的点
由于每次查询的时候可能会把左右两边的子树都查询完,所以,查询并不是简单的 log(n) 的,最坏的时候能够达到 sqrt(n)
4. 在对样本实例进行KD-tree算法
KD(K-dimensional tree)树形结构。KD tree是二叉树
- 原理:如果我们知道A与B非常近,B与C非常近,我们就假定认为A与C非常近,不用确切的计算出他们的距离
- 计算复杂度:

- 对参数空间沿着数据轴(N)进行划分,KDtree 很高效,因为划分过程是在参数轴(N)上进行,而不用管D实例维数
- 但是只有当D很小(D<20)的时候,运算块,当D大时,计算也会变慢
- 对于上面代码,只需修改,algorithm='KDTree'
nbr = neighbors.NearestNeighbors(n_neighbors=2, algorithm='KDTree').fit(x)
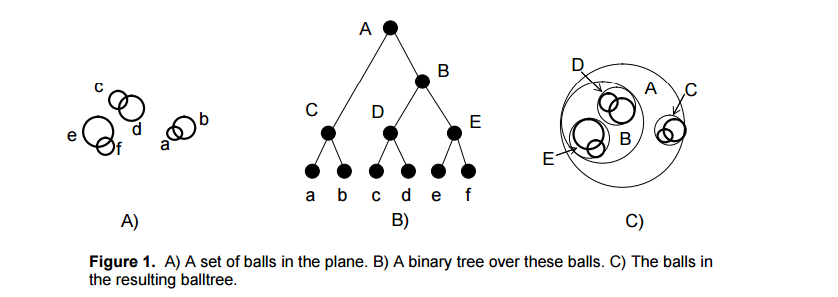
(3)Ball tree
1. 原理:
为了改进KDtree的二叉树树形结构,并且沿着笛卡尔坐标进行划分的低效率,ball tree将在一系列嵌套的超球体上分割数据。也就是说:使用超球面而不是超矩形划分区域。虽然在构建数据结构的花费上大过于KDtree,但是在高维甚至很高维的数据上都表现的很高效。
球树递归地将数据划分为由质心C和半径r定义的节点,使得节点中的每个点都位于由r和C定义的超球内。通过使用三角不等式来减少邻居搜索的候选点数量的

2. 划分
选择一个距离当前圆心最远的观测点i1,和距离i1最远的观测点 i2,将圆中所有离这两个点最近的观测点都赋给这两个簇的中心,然后计算每一个簇的中心点和包含所有其所属观测点的最小半径。对包含n个观测点的超圆进行分割,只需要线性的时间。
3. 查询
使用ball tree时,先自上而下找到包含target的叶子结点(c, r),从此结点中找到离它最近的观测点。这个距离就是最近邻的距离的上界。检查它的兄弟结点中是否包含比这个上界更小的观测点。方法是:如果目标点距离兄弟结点的圆心的距离 > 兄弟节点所在的圆半径 + 前面的上界的值,则这个兄弟结点不可能包含所要的观测点。否则,检查这个兄弟结点是否包含符合条件的观测点。
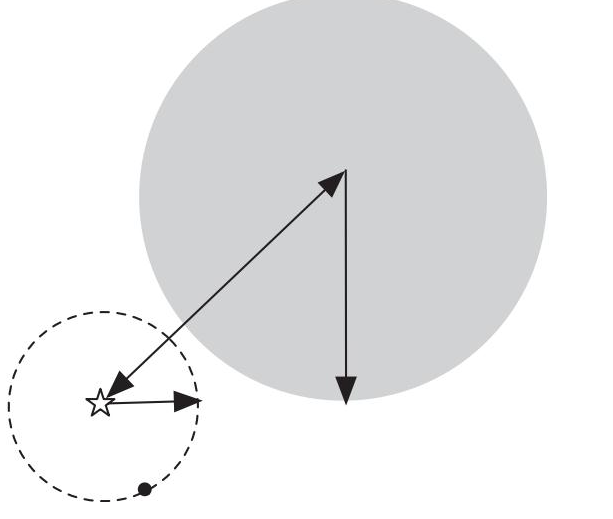
如果:该点的最近距离上确界+兄弟节点的半径 > 该点到兄弟节点圆心的距离,则表明构成了三角形,两个圆必然相交
4. 在对样本实例进行ball tree算法
- 对于上面代码,只需修改,algorithm='ball_tree'
nbr = neighbors.NearestNeighbors(n_neighbors=2, algorithm='ball_tree').fit(x)
(4)选择何种算法
1. 各算法时间复杂度:N:样本数量,D:特征向量
- Brute force query time grows as

- Ball tree query time grows as approximately

- KD tree query time changes with
 in a way that is difficult to precisely characterise. For small (less than 20 or so) the cost is approximately
in a way that is difficult to precisely characterise. For small (less than 20 or so) the cost is approximately  , and the KD tree query can be very efficient. For larger , the cost increases to nearly
, and the KD tree query can be very efficient. For larger , the cost increases to nearly  , and the overhead due to the tree structure can lead to queries which are slower than brute force.
, and the overhead due to the tree structure can lead to queries which are slower than brute force.
对于小数据集(N小于30左右), log(N)可以与N比较,并且强力算法可以比基于树的方法更有效。KDTree和BallTree都通过提供叶大小参数来解决这个问题:这控制了查询切换到暴力的样本数。 这允许两个算法接近小于N的强力计算的效率。
2. 数据结构:
数据的内在维度或数据的稀疏性。 内在维度是指数据所在的D,其可以线性地或非线性地嵌入参数空间中。 稀疏性指的是数据填充参数空间的程度(这与“稀疏”矩阵中使用的概念区分开来。数据矩阵可以没有零项,但是结构在这个项中仍然可以是“稀疏的” )。
- 强制查询时间根据数据结构不变。
- ball tree和KD树查询时间会受到数据结构的很大影响。 一般来说,具有较小固有维度的稀疏数据导致更快的查询时间。 由于KD树内部表示与参数轴对齐,因此对于任意结构化数据,它通常不会显示与ball tree相同的改进。
机器学习中使用的数据集往往是非常结构化的,非常适合基于树的查询。
3. 可以自动选择:
nbr = neighbors.NearestNeighbors(n_neighbors=2, algorithm='auto').fit(x)
目前,如果k <N / 2并且'effective_metric_'在'kd_tree'的'VALID_METRICS'列表中,algorithm ='auto'选择'kd_tree'。 如果k <N / 2并且'effective_metric_'不在'kd_tree'的'VALID_METRICS'列表中,它选择'ball_tree'。 如果k> = N / 2,则选择“brute”。 该选择基于如下假设:查询点的数量至少与训练点的数量相同,并且该leaf_size接近其默认值30。
最新文章
- Linux内核笔记--深入理解文件描述符
- iOS 7.1耗电严重解决办法
- ApacheServer-----关于443端口被占用的解决方法
- Linux学习笔记——查看Linux系统信息的方法
- python报错:SyntaxError: Non-ASCII character '\xe5'的解决方法
- Response.ContentType 详细列表 <转>
- (转) 如何命令查找linux系统版本!
- 201521123087《Java程序设计》 第八周学习总结
- java 文件过滤器
- JS this用法详解
- Centos7安装InfluxDB1.7
- Fiddler设置断点修改Request和Response
- linux学习笔记-文件相关知识
- Python进阶点
- MVC开发中的常见错误-04-“System.NullReferenceException”类型的异常在 BBFJ.OA.WebApp.dll 中发生,但未在用户代码中进行处理
- 如何使用webpack打包项目
- Netty源码分析第1章(Netty启动流程)---->第4节: 注册多路复用
- AM335X can驱动移植
- Codeforces Round #408 (Div. 2) C. Bank Hacking
- CSS3-阴影参数基础